TorpedoAUV
Description
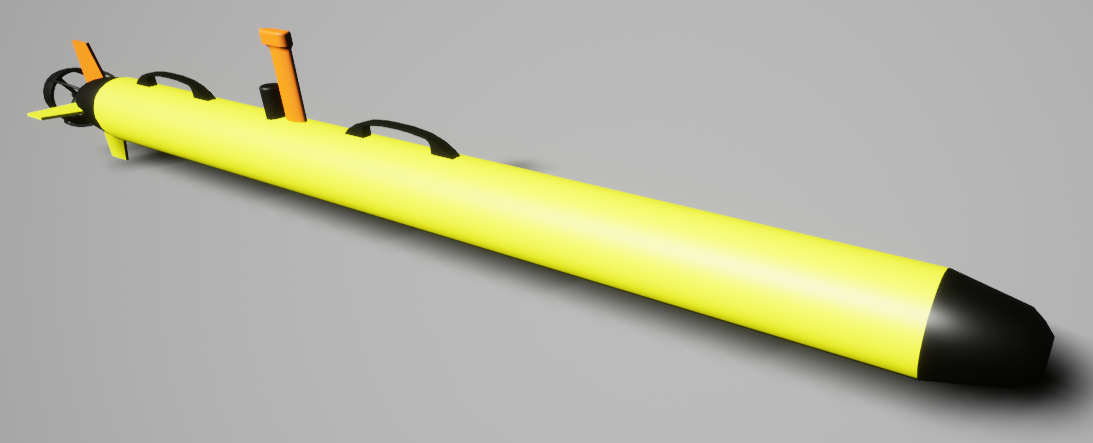
A generic torpedo-style AUV with four fins.
See the TorpedoAUV.
Control Abstractions
- scheme_rudders_sterns_motor_speed
The primary low-level control for the TorpedoAUV actuators.
Format: A 5-length vector
[rudder_top, rudder_bottom, stern_left, stern_right, rpm].- Actuators:
rudder_top/bottom: Control the vertical fins for Yaw (left/right).stern_left/right: Control the horizontal planes for Pitch (up/down).rpm: Controls the main rear propeller thrust.
Note: Since it’s a fin-steered vehicle, you must have forward velocity (RPM > 0) for the rudders/sterns to generate lift and turn the agent.
scheme_depth_heading_rpm_surge
An intermediate abstraction that uses internal PIDs to maintain specific navigation states. Format: A 4-length vector
[depth, heading, rpm, surge].
- Parameters:
depth: Target depth in meters (negative values).
heading: Target yaw orientation in degrees or radians (depending on agent config).
rpm: Base motor speed.
surge: Desired forward speed component.
scheme_accel
Applies direct linear and angular accelerations to the agent in the global frame.
Format: A 6-length vector
[lin_acc_x, lin_acc_y, lin_acc_z, ang_acc_x, ang_acc_y, ang_acc_z].
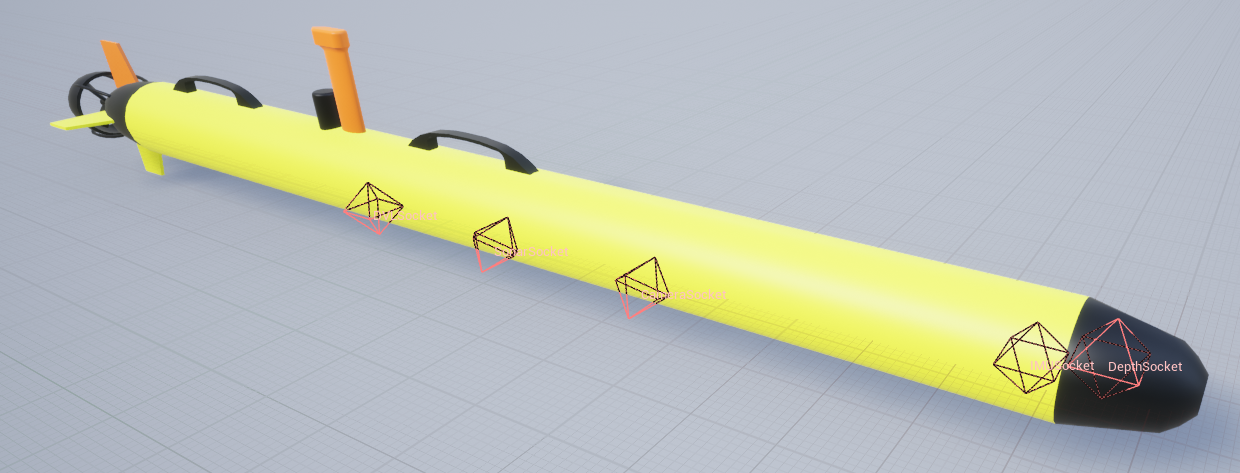
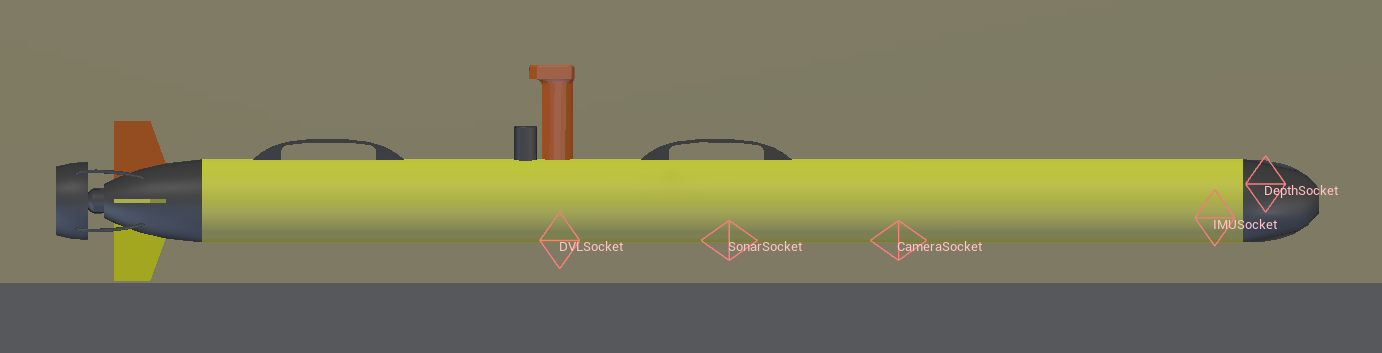
Sockets
All sockets have standard orientation unless stated otherwise. Standard orientation has the x-axis pointing towards the front of the vehicle, the y-axis pointing starboard, and the z-axis pointing upwards.
Socket Definitions
COMCenter of mass.CameraSocketLocation of camera, rotated -90 on y-axis.DVLSocketLocation of the DVLIMUSocketLocation of the IMU.DepthSocketLocation of the depth sensor.SonarSocketLocation of the sonar sensor, rotated -90 on y-axis.Viewportwhere the robot is viewed from.
Socket Frames