Small-Cave
Overview
The Small-Cave environment is a high-complexity cave system designed for micro-agent navigation and confined space exploration. The “Small” designation refers to the tunnel diameter, which is specifically scaled for small robotic agents (ROVs) rather than humans or large vehicles.
- This environment is uniquely challenging as it features three distinct zones:
Fully Submerged: Deep tunnel sections completely filled with water.
Semi-Submerged: Areas with air pockets and varying water levels, ideal for surface-to-underwater transitions.
Dry Zones: Upper cave chambers located entirely above the water line.
Environment Dimensions & Coordinates
The cave system is centered within a specific coordinate grid to assist in SLAM (Simultaneous Localization and Mapping) validation.
Top-Down Layout
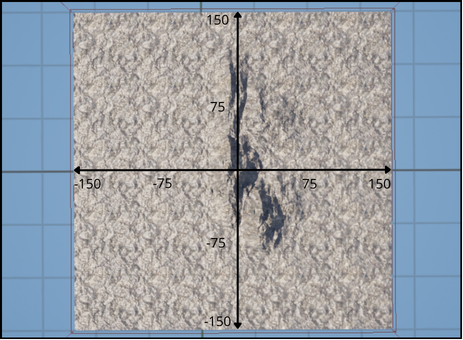
The cave footprint spans from -300 to 300 units on the longitudinal axis and -300 to 300 units laterally. The intricate network of interconnected tunnels is centered at the origin (0,0), providing a complex maze for navigation testing.
Vertical Profile and Water Line
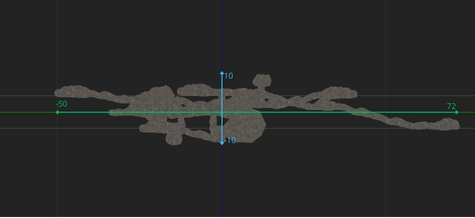
- This cross-section view illustrates the vertical complexity of the system:
Water Surface (Z=0): Represented by the green horizontal line.
Tunnel Depth: Tunnels reach down to -20 meters below the surface.
Cave Ceiling: Dry chambers extend up to +10 meters above the water level.
Landmarks and Waypoints
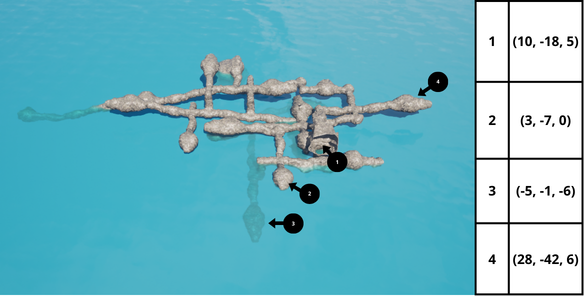
- Key strategic points have been identified for mission planning:
Submerged Entrance (1): The main underwater access point for ROV deployment.
Transition Chamber (2): A semi-submerged zone for testing sensor transitions between air and water.
Deep Siphon (3): A narrow, fully flooded passage requiring precise maneuvering.
Dry Terminal (4): The furthest reach of the dry cave sections.